1.一对齿轮啮合的传动比计算
由于齿轮传动是靠轮齿的依次啮合来传递运动的,所以一对齿轮啮合的传动比总是与两齿轮齿数成反比。在计算传动比时,不仅要确定两齿轮传动比的大小,而且要确定其转向。
对于一对轴线平行的圆柱齿轮传动,其两轮的转向如图所示,其传动比可表示为
i12=n1/n2=±z2/z1
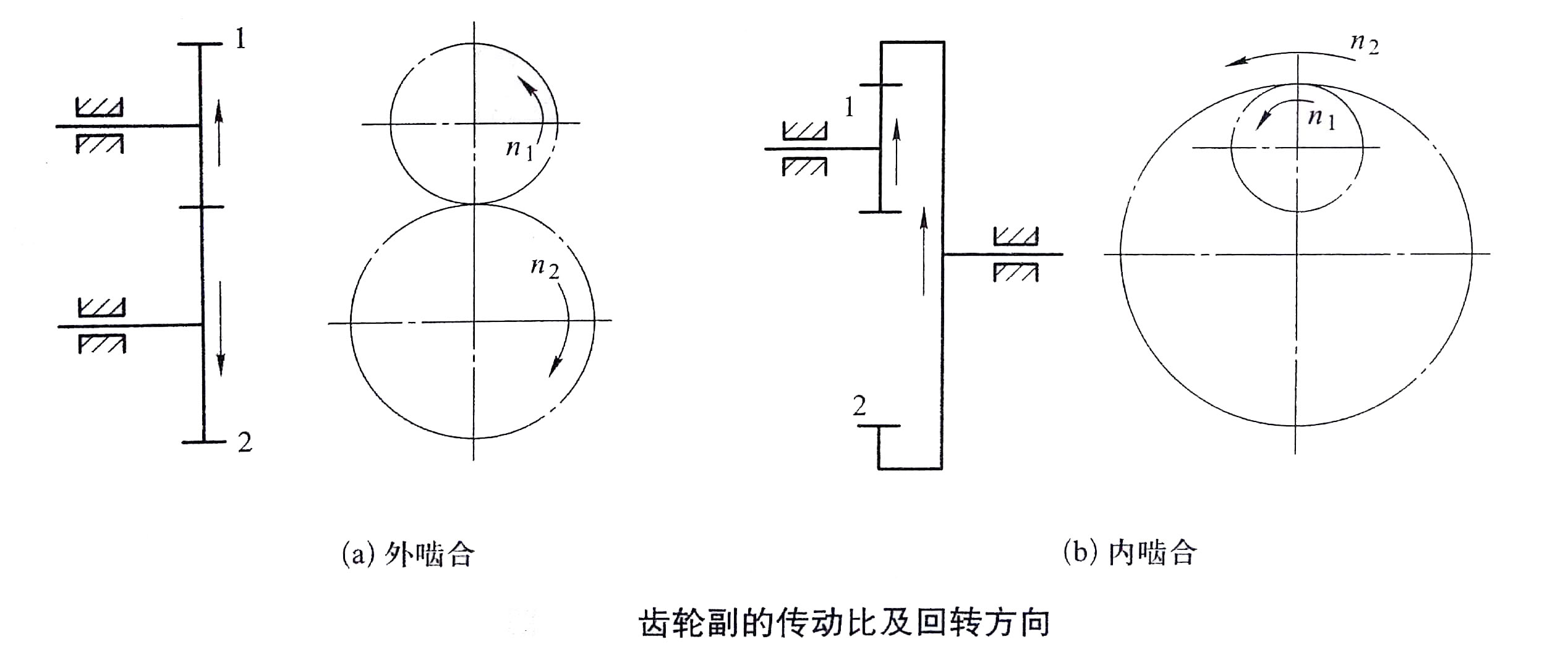
当两齿轮外啮合时,其转向相反(上图a),用负号表示;内啮合时,两齿轮转向相同(上图b),用正号表示。
此外,齿轮的转向若用箭头标注(箭头的方向即为齿轮上可见端面最高点的圆周速度方向),当两箭头方向相同时,用正号表示,反之用负号表示。
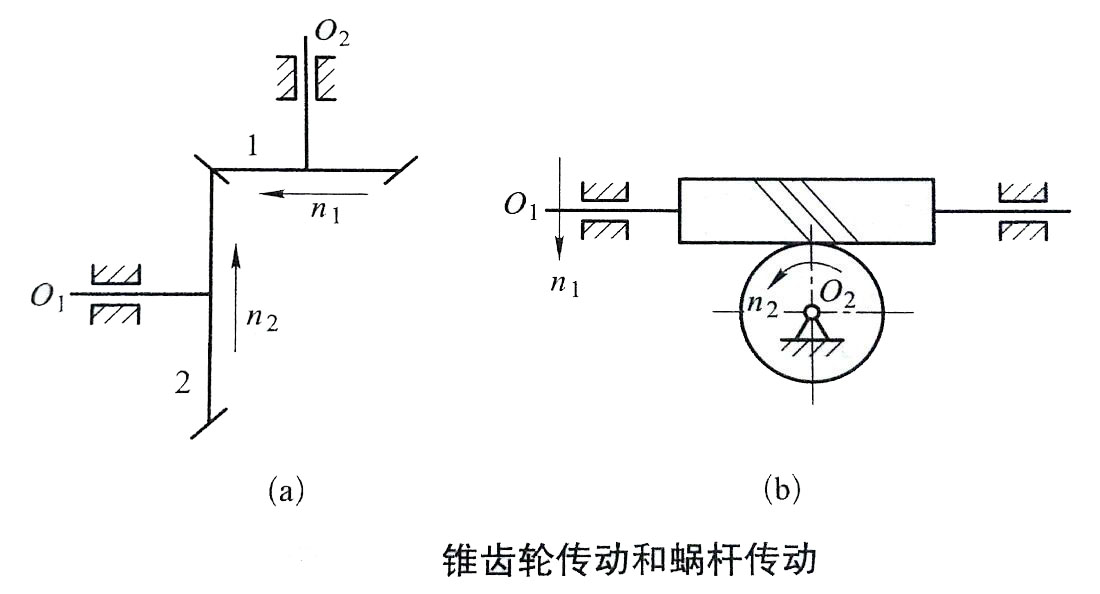
对于轴线不平行的齿轮传动,只计算其传动比的大小。图a所示的锥齿轮传动和图b所示的蜗杆传动,其传动比为
i12=n1/n2=z2/z1
而各轮的转向,只有通过标注箭头的方法来表示。
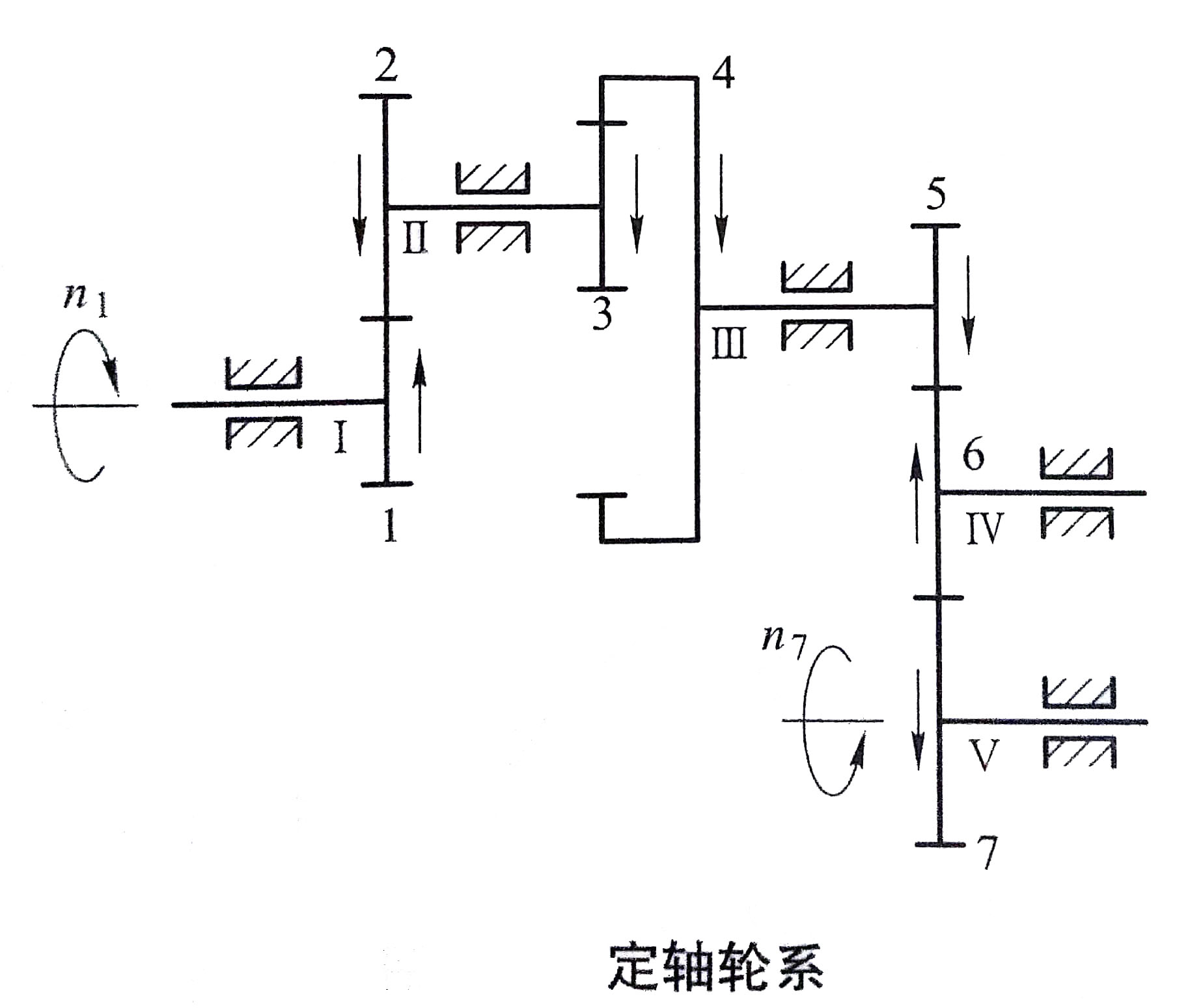
2.定轴轮系传动比的计算
如图所示为定轴轮系,设轮系中各齿轮齿数为z1、z2、z3、z4、z5、z6、z7,转速为n1、n2、n3(=n2)、n4、n5(=n4)、n6、n7。1为首,7为末轮,轮系的传动关系为
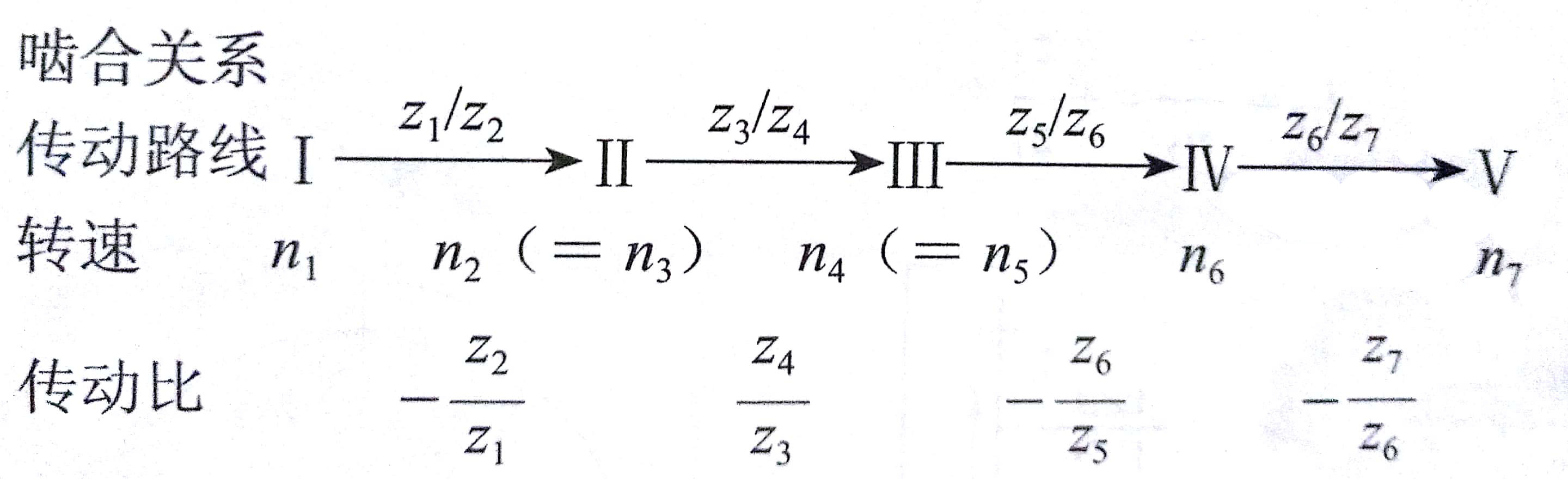
在定轴轮系中,首末齿轮转速之比称为该轮系的传动比,等于各级齿轮副传动比的连乘积,也等于轮系中所有啮合齿轮中从动轮齿数的乘积与主动轮齿数的乘积之比。
图示的定轴轮系,首轮1到末轮7的传动比i17为
![]()
一般情况,如用1、K分别表示定轴轮系中的首末轮,m为外啮合的次数,则传动比的计算公式为
![]()
末轮转向取决于轮系中齿轮外啮合的次数m,判断方法如下。
对于轴线平行的定轴轮系(全为圆柱齿轮),如(-1)m为正,则末轮转向与首轮相同;如(-1)m为负,则末轮转向与首轮转向相反。也可以用箭头判别末轮的转向。
对于轴线不平行的定轴轮系(轮系中有锥齿轮、蜗杆蜗轮传动),只能用上述公式计算传动比的大小,末轮的转向用箭头判别。
知识点词条:传动比


